MDE-YOLOv11: A Real-Time Detection Model for Small and Occluded Objects in Underwater Environments
Keywords:
Underwater object detection, Yolov11, deep learning, RUOD dataset, URPC2020 datasetAbstract
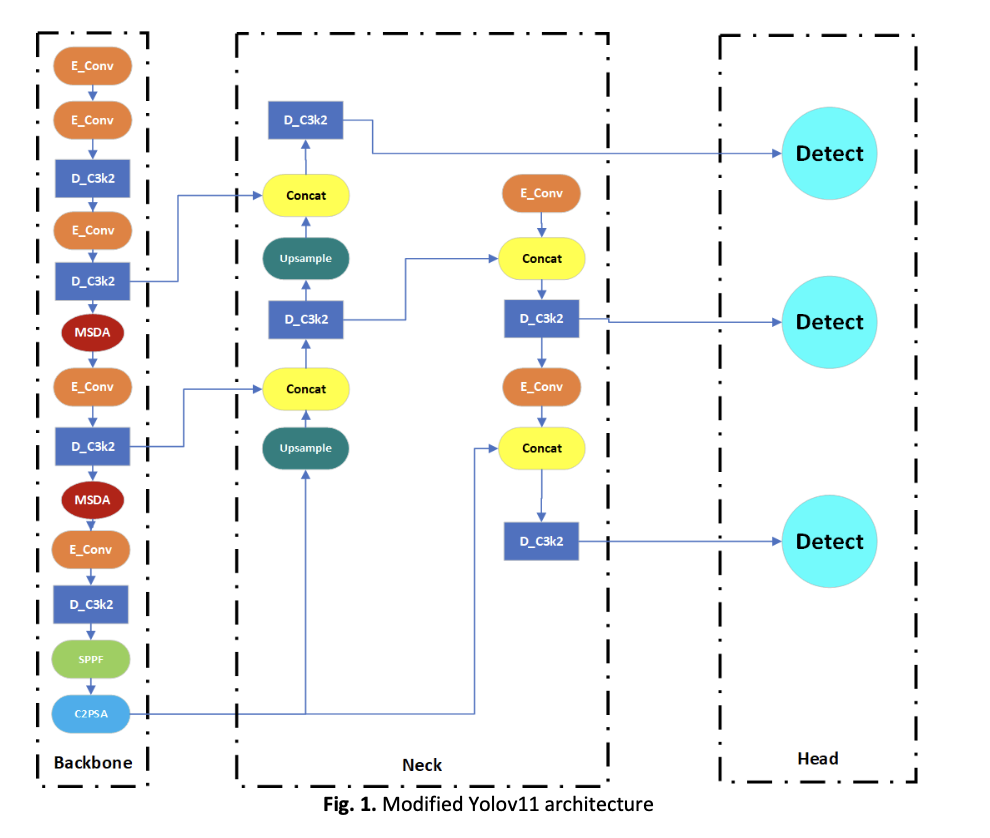
Underwater object detection (UOD) is critical for applications ranging from marine life monitoring and pollution assessment to autonomous underwater navigation. However, detecting objects in underwater environments is highly challenging due to poor visibility, light distortion, and the presence of small, occluded, or camouflaged targets. Traditional object detection models, trained on terrestrial datasets like MS COCO, struggle to generalize to underwater environments. This paper proposes MDE-YOLOv11, an enhanced version of the YOLOv11 model tailored for UOD. The model incorporates Multi-Scale Dilated Attention (MSDA) modules to enhance contextual feature extraction, Deformable Convolutional Networks (DCN) to improve adaptability to irregular object shapes, and Exponential Linear Units (ELU) for better feature preservation in low-contrast conditions. The proposed model was evaluated on two benchmark datasets RUOD and URPC dataset. MDE-YOLOv11 achieves significant improvements, with mAP@50 of 90.6% on RUOD (10.9% over baseline YOLOv11n) and 76.8% on URPC2020 (1.4% over baseline). The model maintains near-real-time performance making it suitable for real-time AUV applications. These enhancements address UOD challenges like small object detection, occlusions, and environmental noise, demonstrating superior accuracy and robustness.